|
|
|
|
 | Roboter Arno |
|
|
|
|
|
|
|
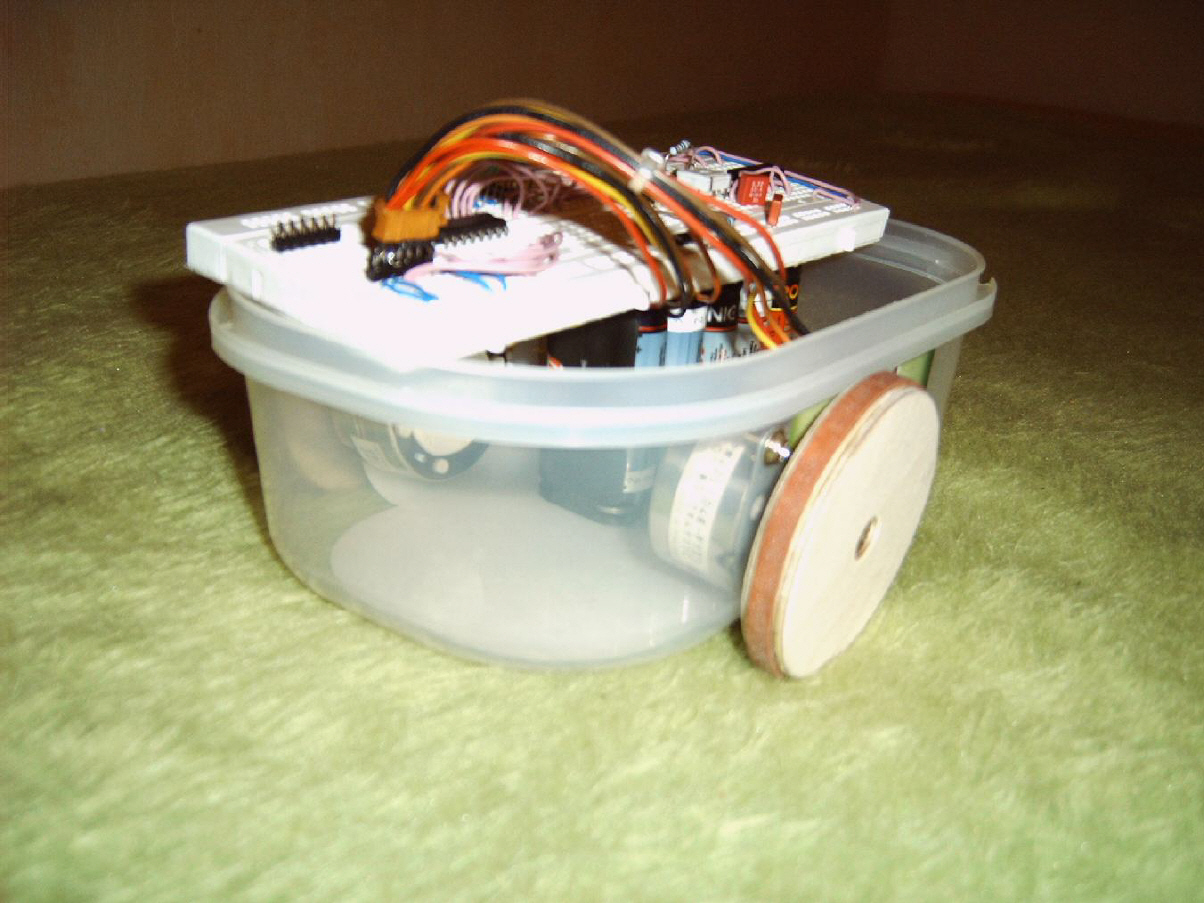
Ich habe wieder gebastelt. Einen Roboter! Das Projekt heißt ARNO und
bedeutet _A_utonomer _R_oboter für _ N_ull Eur_O_. Die Teile stammen aus
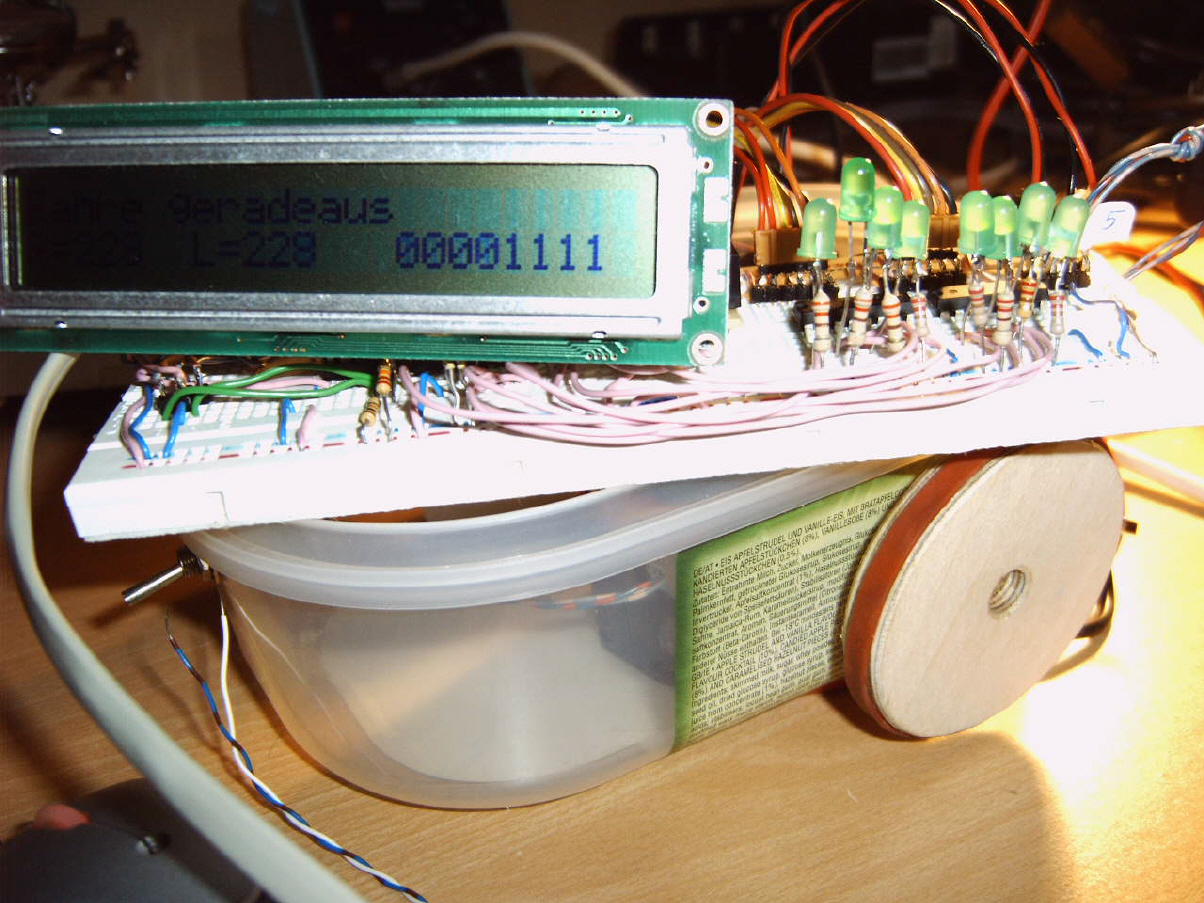
einem uralten Faxgerät (Schrittmotoren), alten Platinen (keine SMD Technik)
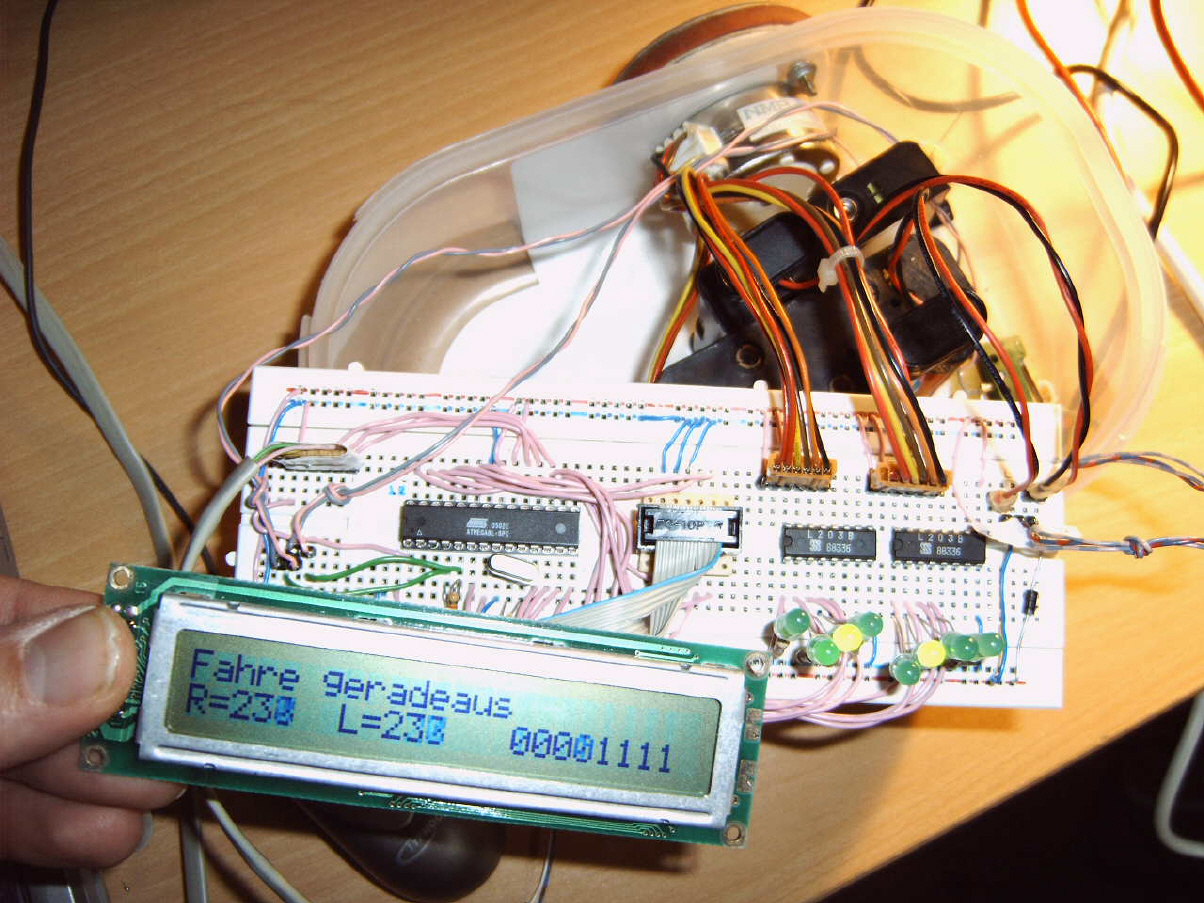
und Telefondisplay. Als Microcontroller dient ein Atmel Mega8 mit 16MHz,
den ich aber mit nur 4 MHz takte. Die meiste Rechenzeit ist Wartezeit auf den
nächsten Schritt des Motors. Feste Hindernisse werden über mehere
Mikroschalter erkannt. Jetzt fehlt noch der Abgrundsensor, damit sich ARNO
nicht von der Tischkante in den Tod stürzt. Hierzu kommt der Papierendesensor
aus dem Fax zum Einsatz. Eine IR-Übertragung von Kommandos
zum Roboter ist gescheitert, da das Dekodieren der Impulse den Robi zum
Stehen bringt und er erst nach 100ms weiter geht. Multitasking ist nicht
möglich. Programmiert habe ich den M8 mit Bascom, einem Basic-Compiler.
Alles sehr einfach, das Programm hat nur etwa 100 Zeilen und die ASM-Datei ist
1,5KB groß. Das Listing schicke ich Interessierten gerne zu. Fotos folgen auf der
Homepage.
|
|
|
|
|
|
Mit Robi ARNO bin ich noch nicht viel weiter. Es fehlt mir das passende Treiber-IC für die Motoren (1x ULM 2003A). Zur Not geht auch zweimal L203, die liegen noch in der Grabbelkiste.
|
|
|
|
|
|
|
|
|
Download robo01.bas [5 KB]
|
|
Sourcecode
|
|
|